



12V dc բարձր արագությամբ փչակ
Փչակի առանձնահատկությունները
Ապրանքանիշի անվանումը` Wonsmart
Բարձր ճնշում dc brushless շարժիչով
Փչակի տեսակը՝ կենտրոնախույս օդափոխիչ
Լարումը` 12 VDC
Առանցքակալ՝ NMB գնդիկավոր
Կիրառելի ճյուղեր: Արտադրական գործարան
Էլեկտրական հոսանքի տեսակը՝ հաստատուն
Սայրի նյութը՝ պլաստիկ
Տեղադրում: Առաստաղի օդափոխիչ
Ծագման վայրը՝ Չժեցյան, Չինաստան
Հավաստագրում՝ ce, RoHS
Երաշխիք՝ 1 տարի
Տրամադրվում է վաճառքից հետո սպասարկում. առցանց աջակցություն
Կյանքի տևողությունը (MTTF): > 20,000 ժամ (25 աստիճան C-ից ցածր)
Քաշը՝ 80 գրամ
Բնակարանային նյութ՝ ԱՀ
Շարժիչի տեսակը՝ եռաֆազ DC առանց խոզանակի շարժիչ
Կարգավորիչ՝ արտաքին


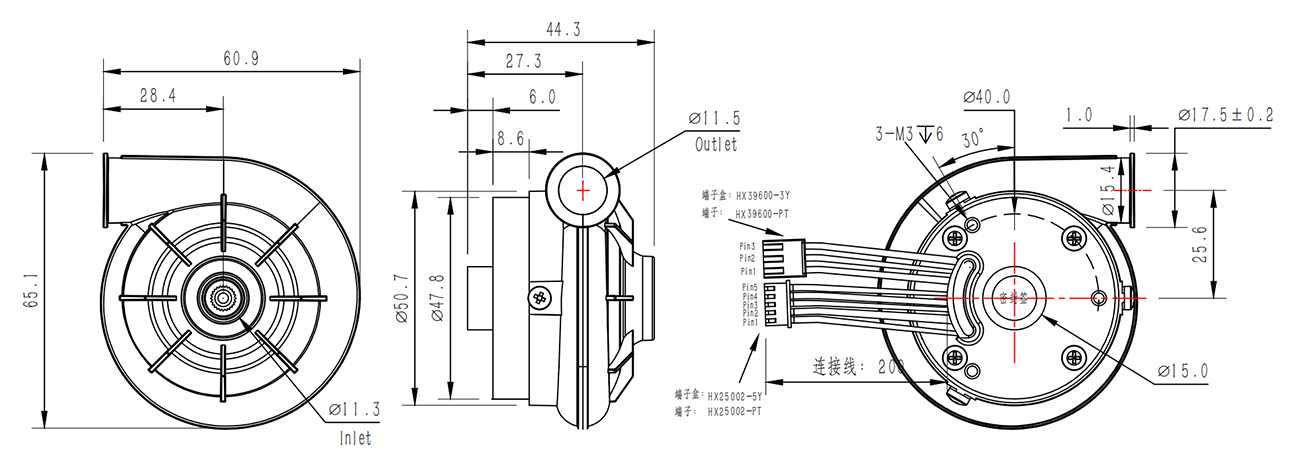
Նկարչություն
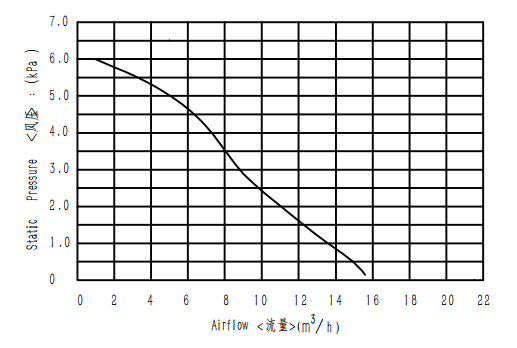
Blower Performance
12V dc բարձր արագությամբ փչակը կարող է հասնել առավելագույնը 16 մ3/ժ օդի հոսքի 0 կՊա ճնշման դեպքում և առավելագույնը 6 կՊա ստատիկ ճնշման դեպքում: Երբ այս փչակը աշխատում է 3 կՊա դիմադրությամբ, եթե մենք սահմանենք 100% PWM, այն ունի առավելագույն ելքային օդի հզորություն: Այն ունի առավելագույն արդյունավետություն, եթե մենք սահմանել 100% PWM: Այլ բեռնվածության կետի կատարումը վերաբերում է ստորև ներկայացված PQ կորին.
Դիմումներ
Այս փչակը կարող է լայնորեն օգտագործվել օդային բարձի մեքենայի, CPAP մեքենայի, SMD զոդման վերամշակման կայանի վրա:
DC Brushless Blower առավելություն
(1). 12V dc բարձր արագությամբ փչակն առանց խոզանակների շարժիչներով և NMB գնդիկավոր առանցքակալներով է, որի ներսում ցույց է տալիս շատ երկար կյանքի ժամկետ; Այս փչակի MTTF-ը կարող է հասնել ավելի քան 20000 ժամ 20 աստիճան C շրջակա միջավայրի ջերմաստիճանում:
(2): Այս օդափոխիչը կարիք չունի սպասարկման
(3): Այս փչակը, որն աշխատում է առանց խոզանակի շարժիչի վերահսկիչի կողմից, ունի բազմաթիվ տարբեր կառավարման գործառույթներ, ինչպիսիք են արագության կարգավորումը, արագության զարկերակային ելքը, արագ արագացումը, արգելակումը և այլն: Այն կարող է հեշտությամբ կառավարվել խելացի մեքենայի և սարքավորումների միջոցով:
(4) շարժիչով առանց խոզանակի վարորդի կողմից, փչիչը կունենա ավելի հոսանքի, տակ/ավելի լարման, կրպակի պաշտպանություն:
Ինչպես ճիշտ օգտագործել փչակը

ՀՏՀ
Հարց. Դուք նաև վաճառո՞ւմ եք կարգավորիչի տախտակ այս օդափոխիչի համար:
A: Այո, մենք կարող ենք մատակարարել հարմարեցված կարգավորիչ տախտակ այս փչակի օդափոխիչի համար:
Բժշկական օդափոխիչներում համակարգի ճնշումը (հոսքի դիմադրությունը) զգալիորեն տատանվում է օդափոխության ժամանակ: Արդյունքում, դժվար է վերահսկել հոսքի արագությունը, եթե ընթացիկ հոսքի արագության և համակարգի սպասվող ճնշումների մեծությունները նախապես հայտնի չեն բավական լավ: ճշգրտություն. Համակարգի ընթացիկ ճնշումը կարող է չափվել և օգտագործվել հետադարձ կապի կառավարման օղակում՝ փչակը կառավարելու իր էլեկտրոնային կառավարման սխեմայի միջոցով: Այնուամենայնիվ, համակարգի ճնշումը փոխվում է՝ կախված իրական հոսքի արագությունից, և փչակի աշխատանքային կետը նույնպես կփոխվի՝ արձագանքելով համակարգի տատանվող ճնշմանը: Սա բժշկական օդափոխիչում անկայունություն կառաջացնի՝ ճշտության սահմանափակման հետևանքով: ճնշման սենսորի, սենսորի դինամիկ վարքագիծը և այլն, որոնք իրենց հերթին հանգեցնում են հոսքի արագության անկայուն և ոչ ճշգրիտ վերահսկման:
Արվեստում հայտնի են տարբեր համակարգեր, որոնք վերահսկում են հոսքը։ Պայմանականորեն, գազի հոսքի արագությունը վերահսկվում է գազի հոսքի փականի գործարկման միջոցով: Հետադարձ հոսքի վերահսկման ավելացման բաղադրիչի և/կամ հետադարձ սխալի ուղղման (օրինակ՝ համաչափ, ինտեգրալ և ածանցյալ սխալի հետադարձ կապի հսկողություն) համակցության հետ միասին դա առաջացնում է պահանջվող պատասխանը:
Գազի հոսքի արագությունը վերահսկելու մեկ այլ հայտնի մեթոդ փչակի հատկությունների բացահայտ օգտագործումն է: Փչակի արագությունը վերահսկելիորեն փոփոխելը կարող է օգտագործվել հոսքը վերահսկելու համար՝ հիմնվելով համակարգի ճնշման և հոսքի արագության միջև կանխորոշված հարաբերությունների վրա: Փչիչը նախագծված է արագ արձագանքելու ներշնչման կամ արտաշնչման փոփոխությանը՝ նվազագույնի հասցնելով դրա իներցիան: Այս դեպքում գազի հոսքը վերահսկելու համար կարող է օգտագործվել նաև հետադարձ կապի կարգավորիչ: Այնուամենայնիվ, համակարգի ճնշման տատանումները կարող են փոխել հոսքի արագությունը նույնիսկ փչակի մշտական արագության դեպքում: Այս խնդիրը չի կարող լիովին լուծվել հետադարձ կապի վերահսկման միջոցով: Համակարգի անընդհատ փոփոխվող ճնշումը սովորաբար հանգեցնում է անկայուն համակարգի կամ թիրախային հոսքի շուրջ տատանումների:





