



PM2.5 դետեկտոր փչակ
Փչակի առանձնահատկությունները
Ապրանքանիշի անվանումը` Wonsmart
Բարձր ճնշում dc brushless շարժիչով
Փչակի տեսակը՝ կենտրոնախույս օդափոխիչ
Լարումը` 220 VAC
Առանցքակալ՝ NMB գնդիկավոր
Կիրառելի ճյուղեր. արտադրական գործարան
Էլեկտրական հոսանքի տեսակը՝ AC
Սայրի նյութը՝ պլաստիկ
Տեղադրում: Առաստաղի օդափոխիչ
Ծագման վայրը՝ Չժեցզյան, Չինաստան
Հավաստագրում՝ ce, RoHS
Երաշխիք՝ 1 տարի
Տրամադրվում է վաճառքից հետո սպասարկում. առցանց աջակցություն
Կյանքի տևողությունը (MTTF): > 20,000 ժամ (25 աստիճան C-ից ցածր)
Քաշը՝ 886 գրամ
Բնակարանային նյութ՝ ԱՀ
Ապրանքի անվանումը՝ PM2.5 դետեկտոր փչակ
Շարժիչի տեսակը՝ եռաֆազ DC առանց խոզանակի շարժիչ
Կարգավորիչ՝ արտաքին
Ստատիկ ճնշում՝ 11 կՊա


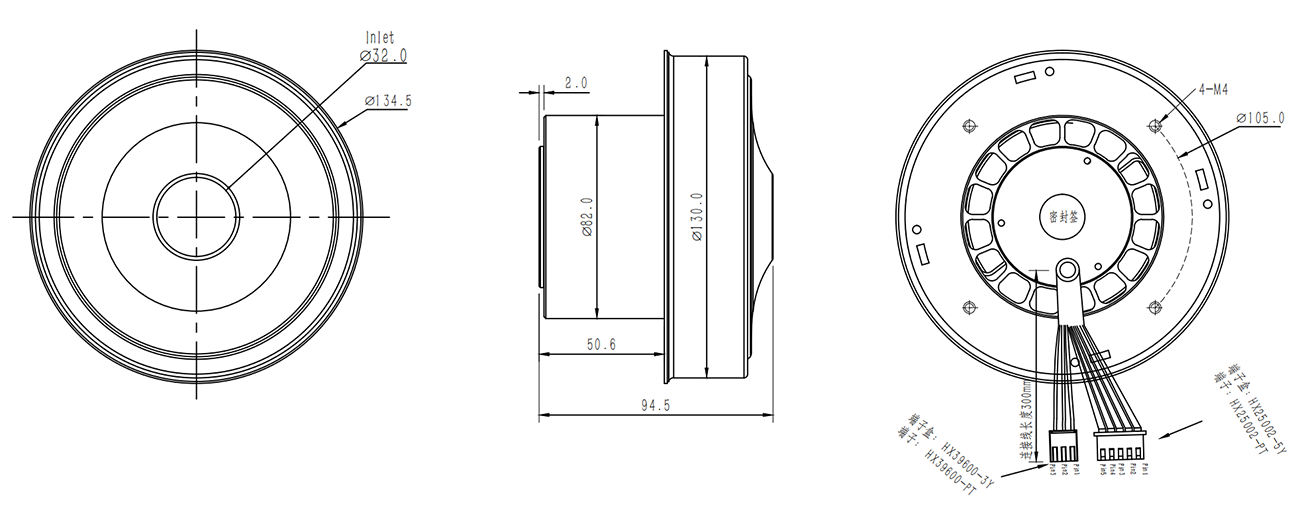
Նկարչություն
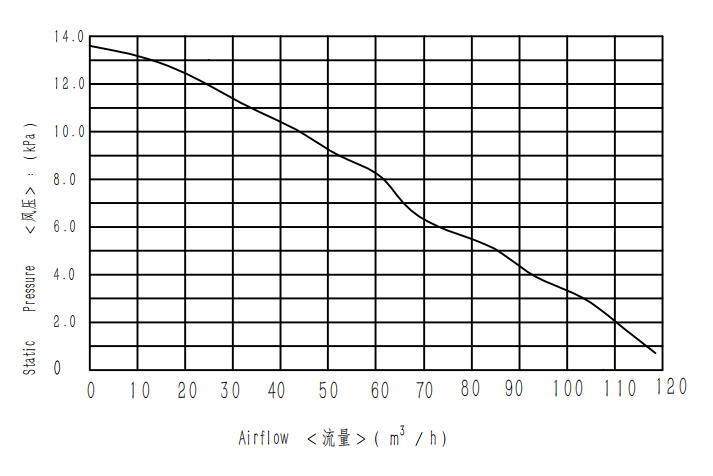
Blower Performance
WS130120S-220-240-X300 օդափոխիչը կարող է հասնել առավելագույն 95 մ3/ժ օդի հոսքի 0 կՊա ճնշման և առավելագույնը 11 կՊա ստատիկ ճնշման դեպքում: Այն ունի առավելագույն ելքային օդի հզորություն, երբ այս փչակը աշխատում է 8,5 կՊա դիմադրության դեպքում, եթե մենք սահմանում ենք 100% PWM, Այն ունի առավելագույն արդյունավետություն: երբ այս փչակը աշխատում է 8,5 կՊա դիմադրության դեպքում, եթե մենք սահմանում ենք 100% PWM: Այլ բեռնվածության կետի կատարումը վերաբերում է PQ կորի ներքևում.
DC Brushless Blower առավելություն
(1)WS130120S-220-240-X300 փչակը առանց խոզանակների շարժիչներով և NMB գնդիկավոր առանցքակալներով ներսում, որը ցույց է տալիս շատ երկար կյանքի ժամկետը.Այս փչակի MTTF-ը կարող է հասնել ավելի քան 15000 ժամ 20 աստիճան C շրջակա միջավայրի ջերմաստիճանում
(2) Այս օդափոխիչը կարիք չունի սպասարկման
(3) Այս փչակը, որը վարում է առանց խոզանակ շարժիչի կարգավորիչը, ունի բազմաթիվ տարբեր կառավարման գործառույթներ, ինչպիսիք են արագության կարգավորումը, արագության զարկերակային ելքը, արագ արագացումը, արգելակումը և այլն: Այն հեշտությամբ կարելի է կառավարել խելացի մեքենայի և սարքավորումների միջոցով:
(4) Շարժիչի առանց խոզանակի վարորդի կողմից վարվող փչակը կունենա հոսանքի, ցածր/ավելորդ լարման, փականի պաշտպանություն:
Դիմումներ
Այս փչակը կարող է լայնորեն օգտագործվել վակուումային մեքենայի, փոշու կոլեկցիոների, հատակի մաքրման մեքենայի վրա:
Ինչպես ճիշտ օգտագործել փչակը
Այս փչակը կարող է աշխատել միայն CCW ուղղությամբ: Հակադարձ շարժիչի շարժման ուղղությունը չի կարող փոխել օդի ուղղությունը:
Զտեք մուտքի վրա՝ փչակը փոշուց և ջրից պաշտպանելու համար:
Պահպանեք շրջակա միջավայրի ջերմաստիճանը հնարավորինս ցածր՝ փչակի շահագործման ժամկետը երկարացնելու համար:
ՀՏՀ
Հարց. Կարո՞ղ ենք օգտագործել այս կենտրոնախույս օդային փչակը ջուրը ներծծելու համար:
A: Այս օդափոխիչը չի կարող օգտագործվել ջուր ծծելու համար:Եթե Ձեզ անհրաժեշտ է ջուր ծծել, կարող եք խնդրել մեզ ընտրել համապատասխան ապրանք այս հատուկ աշխատանքային վիճակի համար:
Հարց. Կարո՞ղ ենք օգտագործել այս կենտրոնախույս օդային փչակը փոշին ուղղակիորեն ծծելու համար:
A: Այս օդափոխիչի օդափոխիչը չի կարող օգտագործվել ուղղակիորեն փոշին ծծելու համար: Եթե ձեզ պետք է փոշի ծծել, կարող եք խնդրել մեզ ընտրել համապատասխան իրը այս հատուկ աշխատանքային վիճակի համար:
Հարց. Ի՞նչ անել, եթե աշխատանքային վիճակը կեղտոտ է:
A: Զտիչը խստորեն խորհուրդ է տրվում հավաքել օդափոխիչի օդափոխիչի մուտքի վրա
Անխոզանակ DC շարժիչի AC servo համակարգը արագ զարգանում է իր փոքր իներցիայի, մեծ ելքային պտտման, պարզ կառավարման և լավ դինամիկ արձագանքի պատճառով:Այն ունի կիրառման լայն հեռանկարներ:Բարձր կատարողականության և բարձր ճշգրտության սերվո շարժիչի ոլորտում այն աստիճանաբար կփոխարինի ավանդական DC սերվո համակարգին:Այնուամենայնիվ, ոլորող մոմենտների ալիքը դեռ գոյություն ունի BLDC-ում, որը չի կարող հասնել ավելի շատ դիրքի վերահսկման և կատարողականի ավելի բարձր արագության վերահսկման:Ֆազային հոսանքի փոխարկումը մեծ ոլորող մոմենտ ստեղծելու հիմնական պատճառներից մեկն է:
AC սերվո համակարգում, որն ունի ոչ փոխակերպվող փուլային հոսանքի հետադարձ կապ, ցածր արագությամբ պտտվող ոլորող ոլորող մոմենտը կարող է վերահսկվել, բայց այն չի կարող կառավարվել բարձր արագությամբ իրավիճակներում, չփոխանցվող փուլային հոսանքն անվերահսկելի է:Հետևաբար, անհրաժեշտ է գտնել կոմուտացիայի օպտիմիզացված սխեման՝ կոմուտացիայի ոլորող մոմենտների ավելի լավ կատարման հասնելու համար:
Կոմուտացիայի գործընթացում ինվերտորի միացման արդյունավետ վիճակը պետք է ընտրվի կանոնների համաձայն:
Կանոն 1. Հետևեք ռոտորի ներկայիս դիրքին, այսինքն՝ անջատեք համապատասխան անջատիչը, և պետք է տեղադրվի համապատասխան անջատիչը:
Կանոն 2. Կանոն 1-ի համաձայն, կարող են օգտագործվել միայնակ և երկբևեռ հսկողություն:
Կանոն 3. թույլ տվեք անջատել համապատասխան անջատիչի ուշացումը:
Անջատիչի կառավարման ռազմավարության արժանիքներն ու սխալները կոմուտացիոն վիճակում գնահատվում են հետևյալ երկու ինդեքսներով.
1. ոլորող մոմենտի իմպուլսացիան, որն առաջանում է կոմուտացիայի արդյունքում, հնարավորինս փոքր է (ոչ կոմուտացիոն հոսանքի իմպուլսացիա՝ հնարավորինս փոքր):
2. հնարավորինս կրճատել փոխարկման ժամանակը:

